![]()
|
�����z
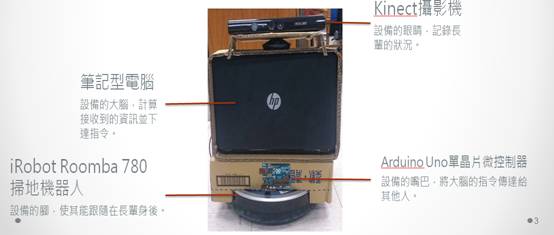
l kinect Kinect�����W��3�����Y�A���������Y�O�@��`����RGB�m����v���A���k�������Y�h���O�����~�u�o�g���M���~�uCMOS��v���Һc����3D�`�P�����C�z�L�o�T�����Y�AKinect�i�H�q�ҩ��᪺�v�����A��ؼЪ����`�קP�_�B���[�l�ܡK���\��A�]�]�������ڭ̳]�Ƥ��̭��n���@�����C l Arduino Arduino�A�O�@�Ӷ}���l�X���洹���L����A���ϥΤFAtmel
AVR������A�ĥΤF���}���l�X���n�w�饭�x�A�غc��²����X/��J(simple I/O)�����O�A�åB�㦳�ϥ�����Java�BC�y����Processing/Wiring�}�o���ҡC�i²��a�P�P�����A�U���U�˪��q�l����s���C�ڭ̱N���P���~�u�o�g���s���A�çQ�Υ��ӵo�g�һݤ����~�u�T��
l iRobot Roomba 780 iRobot
Roomba 780�O�@�Ӧ۰ʤƪ��u�ŧl�о����H�C�b�@�몺�a�x���ҤU�A���i��V��ê���åB�̨ΤƧl�вM���C�ڭ̧Q��Roomba����ӳ]�Ƥ�����A�W�[���餧���ʩʡA�Ϩ�F���H�v���l�ܨϥΪ̪��\��æP�ɹF��M�䤧�ĪG�C |
||||||
|
|
|